
Baby Octopuses, Traffic Jams, and Cubelets: Teaching Complex Systems in the Classroom
Baby Octopuses, Traffic Jams, and Cubelets: Teaching Complex Systems in the Classroom Flashback to an episode of Factor Ciencia filmed in 2023 at the Escuela
Baby Octopuses, Traffic Jams, and Cubelets: Teaching Complex Systems in the Classroom Flashback to an episode of Factor Ciencia filmed in 2023 at the Escuela
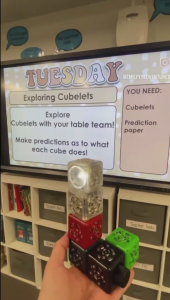

As the library media specialist at Avail Academy in Edina, Minnesota, Karen Christensson has been utilizing Cubelets in her makerspace for three years. During each

Barbie Atkinson has been using Cubelets for four years in her role as media clerk for Park Hill Elementary in Derby, Kansas. As an educator,
We think about Cubelets in a lot of different ways, but when we were inventing them back in the mid 2000s at Carnegie Mellon, I

It’s the day after Thanksgiving in the USA, and after a holiday hopefully filled with family, gratitude, and a good meal, it feels like the

Kasey Herzberg is the Executive Director of the Challenger Learning Center of Minnesota, a nonprofit working to bring a unique and powerful STEM education center

Across the street from Modular Robotics in Boulder is an industrial air and gas supply store. They’ve got a sign out front with reconfigurable letters
Happy New Year from Modular Robotics! Mary here, the new Educational Community Manager on the Modular Robotics team. I’m so excited to join this vibrant
Like many companies, Modular Robotics has been experiencing stock shortages and shipping delays for the past several months. We know that many of you are
Research and development at Modular Robotics has been generously funded in part by SBIR grants from the National Science Foundation.

2020
Learning® Magazine Teachers’ Choice℠
Award for the Classroom

2019
Parents’ Choice Recommended Award®

2019
Common Sense Education
Top Pick for Learning

2019
The National Parenting Center
Seal of Approval

2018
STEM.org
Authenticated™ Educational Product

Cubelets FAQs is your place to find answers to common questions about Cubelets robot blocks, orders, and Modular Robotics.
Need help, can't find an answer? Contact the Modular Robotics support team and we'll help you!
Get the details on Modular Robotics shipping policies and sales tax collection for orders in the United States and around the world.

Cubelets are backed by a one year warranty. Need to make a claim, get a replacement, or have questions? Click to get started.

Explore a huge collection of K-12 lessons, activities, guides, training, and more.
Learn everything you need to know to start creating more with Cubelets robot blocks in this handy Getting Started Guide.
Go beyond the building blocks and play with the code inside. Cubelets apps make it easy to create even more with your Cubelets.

There are millions of robots you can create with Cubelets. Check out these robots to help inspire your inventions.